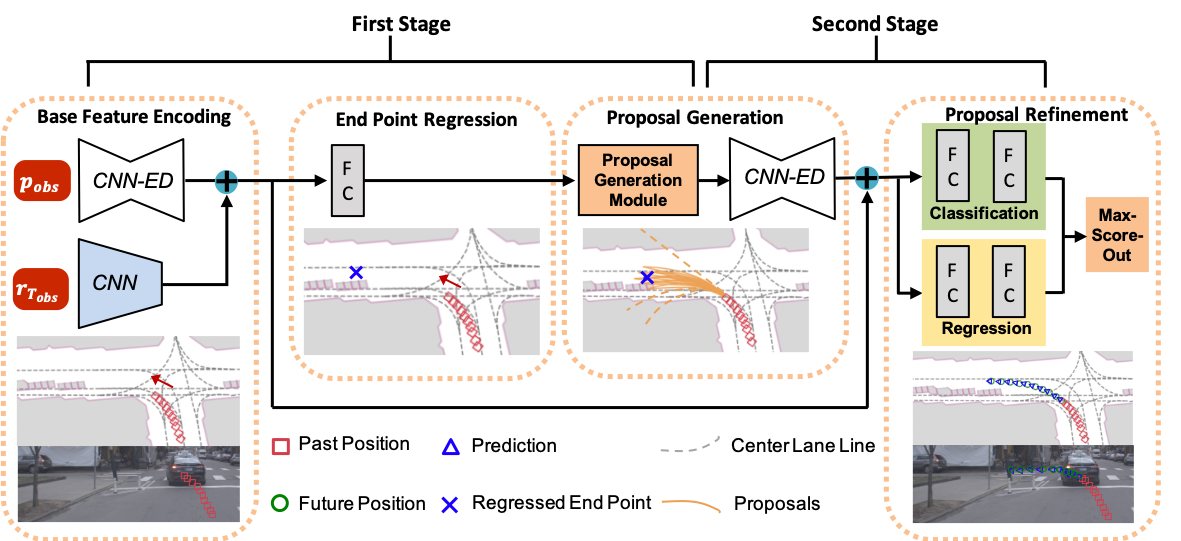
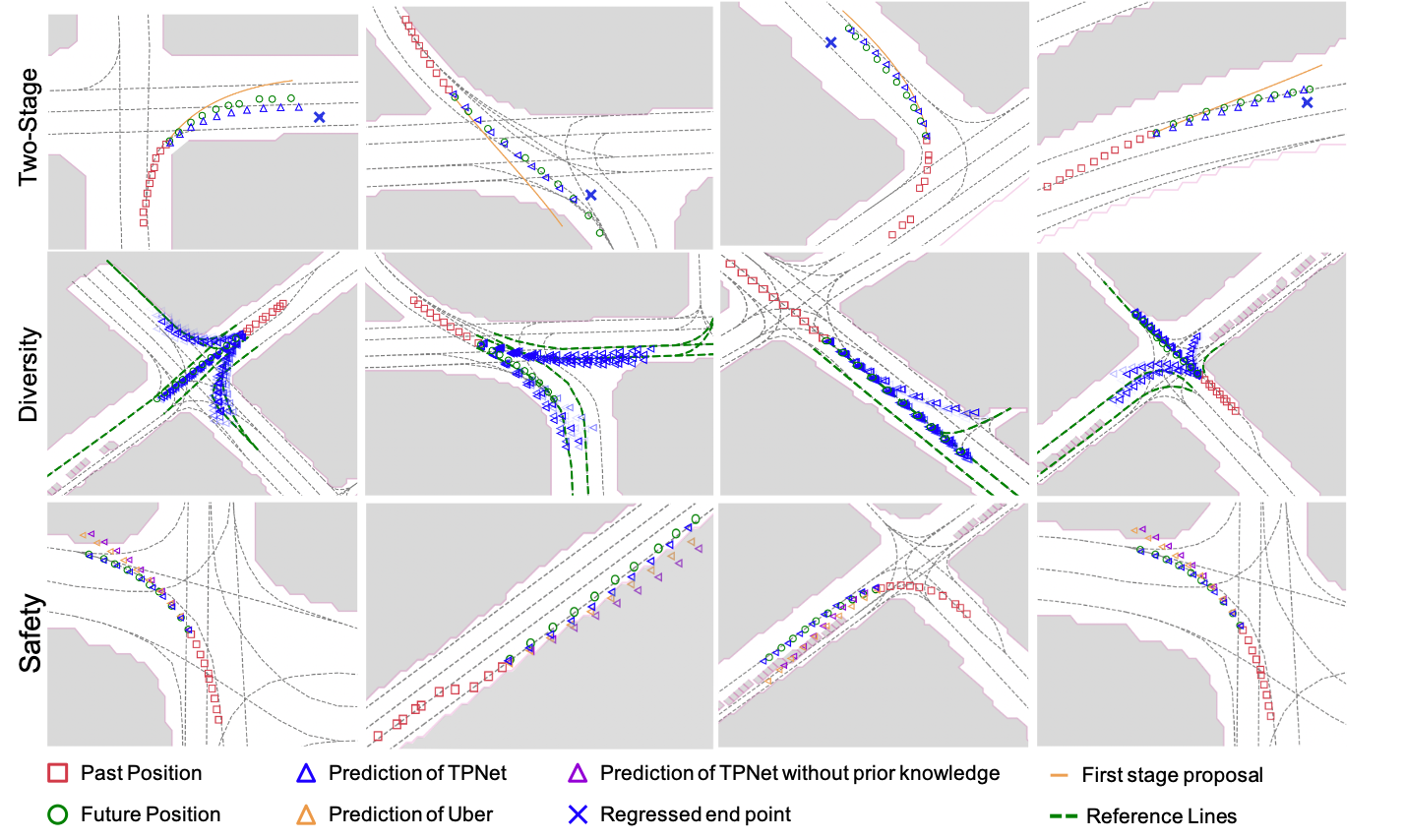
TPNet: Trajectory Proposal Network for Motion Prediction
1SenseTime Group Limited
2The Chinese University of Hong Kong
*Equal contribution.
2The Chinese University of Hong Kong
*Equal contribution.
 |
@inproceedings{fang2020,
title = {Trajectory Proposal Network for Safe and Multimodal Motion Prediction},
author = {Fang, Liangji and Jiang, Qinhong and Shi, Jianping and Zhou, Bolei},
booktitle = {CVPR},
year = {2020}
}