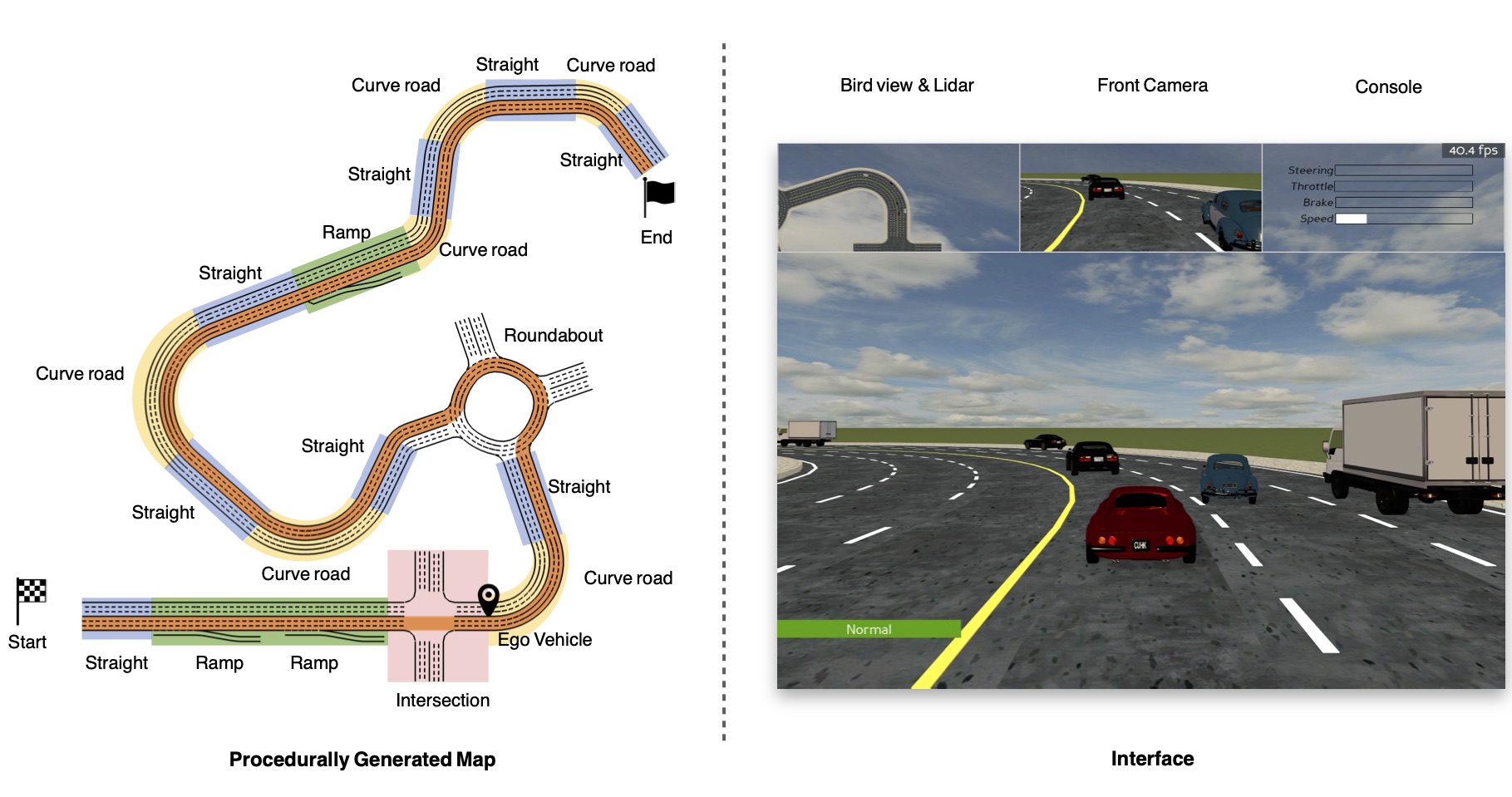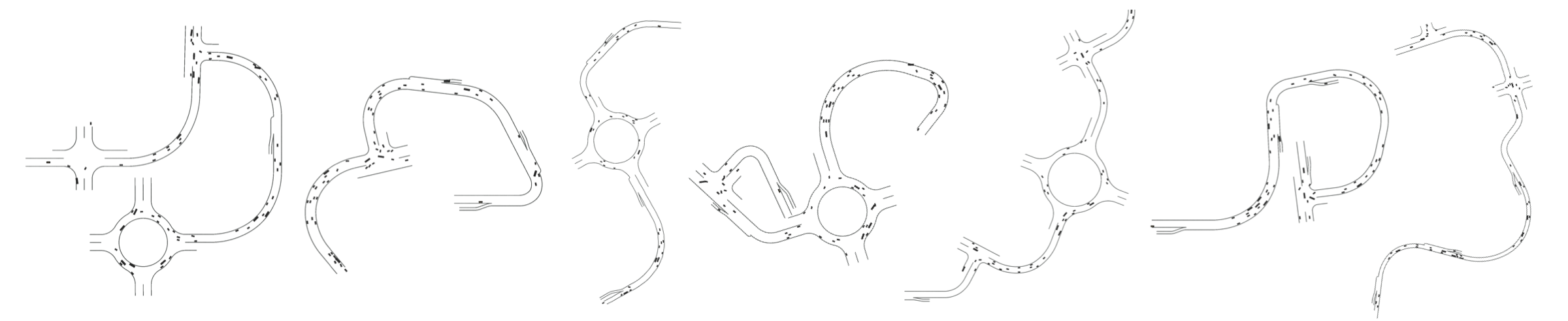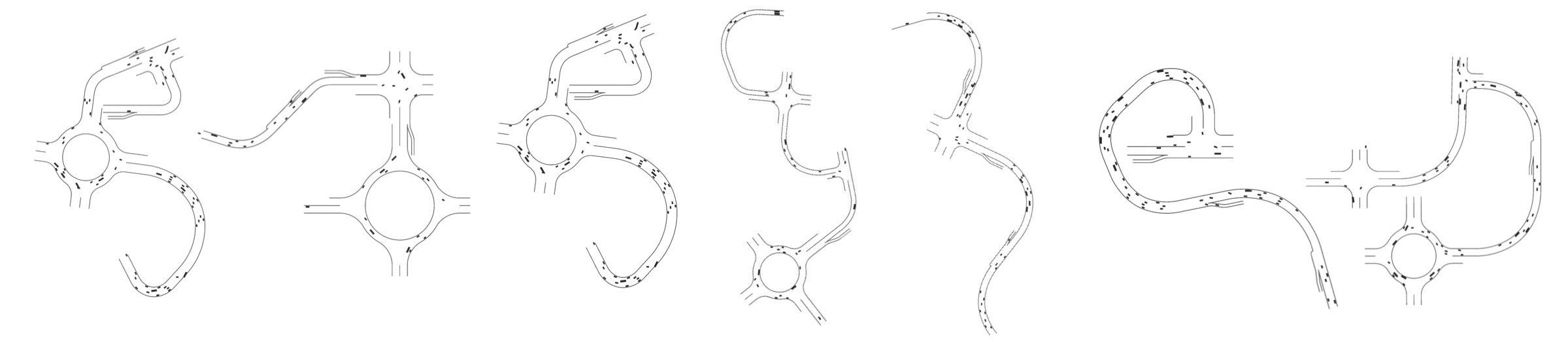

PGDrive: An Open-ended Driving Simulator
with Infinite Scenes from Procedural Generation
with Infinite Scenes from Procedural Generation
1The Chinese University of Hong Kong, 2SenseTime Research, 3Zhejiang
University
| Code | Documentation | Paper |